

The Espy is a remote operated vehicle (ROV) that is used to monitor marine environments through underwater observations. It will outdate the current human diver based survey process in almost every application. It is more effective, more reliable, cheaper, safer and causes much less disturbance to the natural environment.
There is no competitor ROV for marine surveys as those that exist have only a single forward facing camera and are unstable in light currents. The Espy is built off a foundation of field-proven ROV technology but adapted to better suit its operating environment. Features such as a wing design with tilting rotors and a self-levelling gyro allow it to remain controllable in harsher conditions. It also houses six GoPro cameras that enable a ‘Google Street View’ style, full environment, 360 degree video recording (www.360heros.com) without getting your feet wet and then the comfortably of analysing the data once ashore.
The Espy’s rugged design with protective cage, bumpers and easy grab handle make it a simple and dependable ROV during deployment, use and recovery.
As Sean Connel, the head of Marine Biology at Adelaide University, stated, “You wouldn't go to a marine biology lab and not see one, if not two of these on the shelf... It would probably revolutionize the way we do a lot of our science...” With Marine biology obviously only being one potential commercial oppertunity.
Awards:
Winner: Greatest Benifit to Humanity
Awarder: University of New South Wales
Austrailan Runner up: Dyson Award
Awarder: The James Dyson Foundation
Publications:
Tuvie – Modern Industrial Design & Future Technology:
http://www.tuvie.com/espy-360-rov-underwater-spy-monitors-marine-environment-in-more-effective-and-safer-way/
Serious Wonder - progressive futurist technology and consciousness website
http://www.seriouswonder.com/espy-360-rov
Cinescopophilia - Cinema Camera Gear News for Today's Filmmakers:
http://cinescopophilia.com/espy-rov-360-degree-camera-rig-with-6-gopro-cameras/
Copyright - November 2013


Prototype model at UNSW Marine Biology facility in Chowder Bay, Sydney, Australia.


Breakdown of marine biology, the faults with the current surveying process, and the current closest solution
Due to the scientific nature of the Espy it was extremely important to calculate the design requirements and calibrate the list to existing products.
I created a definitive list that covers all aspects of the Espy’s use throughout its lifecycle. It takes into account the stage of use, the environmental conditions, and the operation scenario then states the inherent risks, the design requirement and then the design solution.
Creating this comprehensive matrix enabled a reference point for the Espy design solution to be checked against; to ensure every design decision is made for the correct objective reason and is quantifiably justified.

The Espy is a platform for the convergence of many different innovative technologies but to make the device as reliable as possible it uses field-proven ROV components where possible. The main requirement of the technical package of this device is that it can function continually and consistently in the Espy’s harsh operating environment.

Due to the large engineering element of this project it was vital to test the effectiveness of the design. To test the hydrodynamics of the wing shape a prototype was created. The model trapped in the correct volume of air and was then weighted to make it neutrally buoyant.
The test was successful with the prototype consistently remaining at its intended depth regardless of its speed.
When testing with a box shape (replica of current ROVs) it spun uncontrollably, justifying the wing design of the Espy.
The test was successful with the prototype consistently remaining at its intended depth regardless of its speed.
When testing with a box shape (replica of current ROVs) it spun uncontrollably, justifying the wing design of the Espy.

Obviously, the first place the Espy is going to be in its usage cycle is above water, during transportation, unpacking, and assembly for deployment and then the reverse again after its use. Simplistically, the ROV needs to be simple, safe and protected during this stage of use.



The Espy’s natural operating environment is when it’s submerged as this is where the majority of its design features are in operation. The overall design outcome for this stage of use is that the ROV remains stable and controllable in its environment, enables 360-degree observation, all while protecting itself from damage and being simple and safe in its operation.


Typical current ROVs utilize two fixed horizontal thrusters and one fixed vertical thrusters which makes them difficult to control in currents. The Espy has twin tilting thrusters and a 3-axis accelerometer and gyro that enables the device to recognise when it is being influenced its environment and then automatically compensate by angling its thrusters to keep it travelling along its intended path; making it much more stable and controllable than other ROVs.


The Espy is an ROV with new, innovative features that make it a next-generation type of product. While the device’s aesthetics are heavily influenced by the functions of the device, its visual language still needs to be reminiscent of scientific marine equipment. The other function of the device’s aesthetics is that it needs to reflect the rugged nature of the product so that the user has the confidence to treat it the way it is designed to be treated.

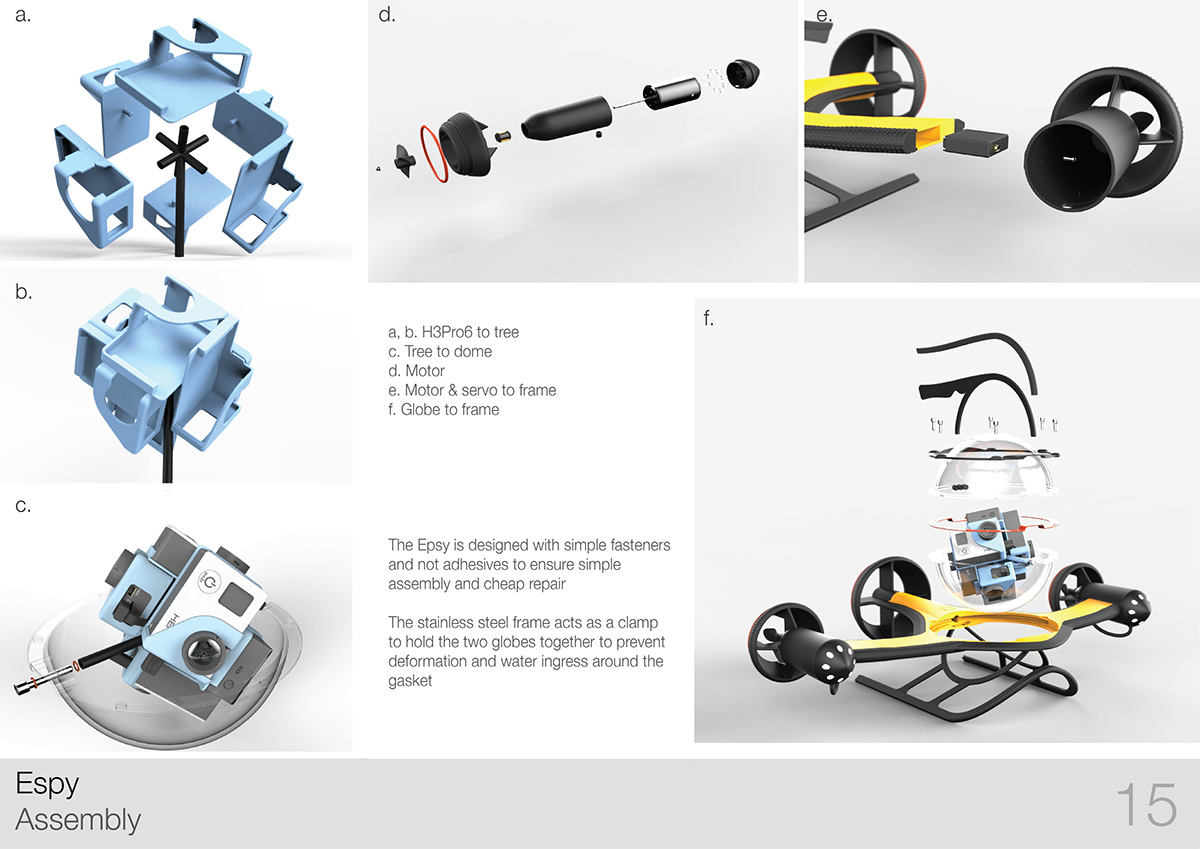
The Espy like other scientific or aquatic system requires maintenance and servicing both professionally and non-professionally. In terms of user maintenance the device needs to be easy to comprehensively clean (IP69k compliant – explain) and replacement of the oil-shaft cartages (every 50 hours of use) needs to be simple and quick unlike current ROVs. In terms of professional maintenance, the replacement of any parts must be quick and require minimal disassembly.


Prototype model at UNSW Marine Biology facility in Chowder Bay, Sydney, Australia.
The Espy in its submerged operating environment may be where most of the design decisions have gone but that is only to make the review stage of use successful. After all the Espy’s foremost function is to observe marine life. The main two outcomes for this stage are for the reviewing of datan ot to require disassembly of the device and to support software that can automatically conduct fish counts of the data.

Current micro ROVs cost between $25,000 and $75,000. Although a large portion of these costs are covering the research and development of the products it is still very important to keep the cost of goods sold (COGs) to a minimum; obviously without compromising any functions of the device. The materials and processes were selected on the basis that they that suit the Espy’s corrosive operating environments and its relatively low manufacture numbers.

Breakdown of the materials used, the manufacturing processes and costings



